言語の変更 :

軽量ロボットによる効率的なキュウリの収穫
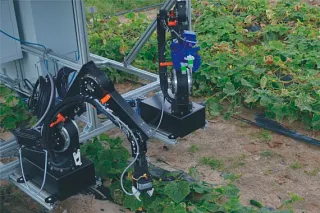
- 求められていたもの:キュウリ収穫のための経済的で効率的な自動化ソリューション
- 要件:迅速な投資回収、耐候性コンポーネント
- 素材: robolink® DCi多関節アームロボット
- 産業: 農業工学
- お客様の成功大幅なコスト削減、従業員の負担軽減、シンプルな収穫計画
お問合せ
ご不明な点がございましたら、お気軽にお問い合わせください。

お問合せ対応時間
電話およびチャットでの対応時間:
月曜~金曜:8:45~18:00
電話およびチャットでの対応時間:
月曜~金曜:8:45~18:00