ロボットアームとは?定義・種類・構造・選定基準について
ロボットアームとは

ロボットアームとは、人間の腕のような動作をする機構のことで、一般的にプログラミングされた動作を行います。
大きな装置の一部分をロボットアームと呼ぶ場合や、ユニット全体をロボットアームと呼ぶこともあります。伸縮や回転、動力を伝える接続部はジョイントと呼ばれ、リンクで接続されています。
大きな装置の一部分をロボットアームと呼ぶ場合や、ユニット全体をロボットアームと呼ぶこともあります。伸縮や回転、動力を伝える接続部はジョイントと呼ばれ、リンクで接続されています。
ロボットアームの種類
様々なロボットアームをイグスの製品を通して紹介します。
垂直多関節ロボット ReBeL
・4軸~6軸で構成されるロボット・人の腕の動きに近い動作が可能
垂直多関節ロボット ReBeL について詳しく
スカラロボット
・短いタクトタイムに強い・構造が単純で制御が容易
スカラロボットについて詳しく
パラレルリンクロボット
・高速で精密な動作が可能・メンテナンスが容易
パラレルリンクロボットについて詳しく
直交ロボット
・組み立てや搬送工程に向いている・比較的低コストで導入できる
直交ロボットについて詳しく
ロボットアームの構成要素
6軸垂直多関節ロボットを例に説明
ロボットアームは、リンクとジョイントの組み合わせで構成されています。
・ジョイント
⇒回転など動きを伝達する役割。人間の腕で言うところの「関節」に相当する部分
・リンク
⇒ジョイントとジョイントを接続する部分。人間の腕で言うところの「骨」に相当する部分
・ジョイント
⇒回転など動きを伝達する役割。人間の腕で言うところの「関節」に相当する部分
・リンク
⇒ジョイントとジョイントを接続する部分。人間の腕で言うところの「骨」に相当する部分

ロボットアームの仕組み
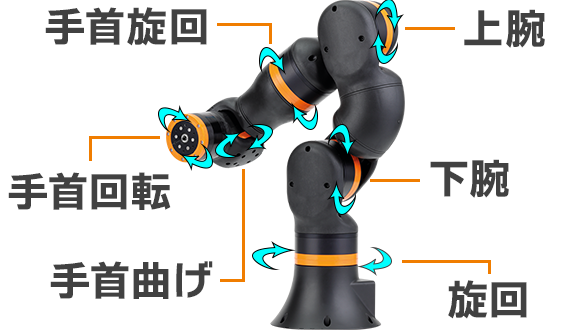
各ジョイントには動作の役割があり、ジョイントが多いほど動きに対する自由度が大きくなることが特徴です。
第1軸:旋回
ロボット全体の向きを変える軸
第2軸:下腕
ロボット全体を前後に動かす軸
第3軸:上腕
腕を上下に動かす軸
第4軸:手首旋回
腕を回転させる軸
第5軸:手首曲げ
手首を上下に動かす軸
第6軸:手首回転
手首を回転させる軸
第1軸:旋回
ロボット全体の向きを変える軸
第2軸:下腕
ロボット全体を前後に動かす軸
第3軸:上腕
腕を上下に動かす軸
第4軸:手首旋回
腕を回転させる軸
第5軸:手首曲げ
手首を上下に動かす軸
第6軸:手首回転
手首を回転させる軸
ロボットハンドについて
ロボットアームが人間の「腕」に相当するならば、ロボットハンドは「手」に相当します。
ワークを指や爪で掴むものや、磁石やバキュームで吸着するものなど様々です。
ワークの材質、大きさ、重量に合わせて最適なものを選定することが必要になります。
ワークを指や爪で掴むものや、磁石やバキュームで吸着するものなど様々です。
ワークの材質、大きさ、重量に合わせて最適なものを選定することが必要になります。
ローコストロボット・マーケットプレイスへ(外部リンク)
ロボットアームを選定するときのポイント
可動範囲
可搬重量
精度
速度
駆動方式
まとめ
ロボットアームの定義をおさらい
ロボットアームとは・人間の腕のような動作をする機構
・プログラミングされた動作を行う
・装置の一部、もしくはユニット全体ををロボットアームと呼ぶ
・動力伝達部:ジョイント(人間の関節)とリンク(人間の骨)で構成
選定ポイントのまとめ
以下の点を確認し、最適なロボットアームの選定を進めてください・可動範囲 ⇒ワーク運送範囲
・可搬重量 ⇒ワーク重量
・精度 ⇒位置決め精度
・速度 ⇒前後工程の速度と合わせて
・駆動方式 ⇒用途に応じた方式を選択
LCAマガジン
協働ロボットをはじめとした、イグスのLCA(ローコストオートメーション)製品をまとめたカタログ(PDF)をダウンロードいただけます。LCAマガジンをダウンロードする
