言語の変更 :
イグスのロボット制御ソフトウェア
ロボットのプログラミング、シミュレーション、制御ソフトウェアはライセンスフリー
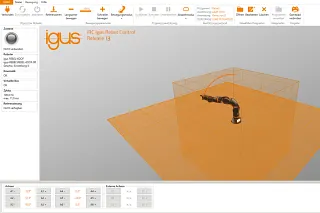
イグスのロボットコントローラーは、シンプルで直感的なロボットプログラミングと制御システムを可能にし、自動化を簡単に始めることができます。モジュラー式構造により、デルタロボット、直交ロボット、協働ロボットなど、さまざまなロボットのキネマティクスを制御することができます。ソフトウェアは、3Dサーフェス上でロボットの個々の動きをシミュレートするために使用できます。このステップではロボットを接続する必要はありません。
本ページの紹介内容
無料ロボット制御ソフトウェア
ロボット制御ソフトウェアによる各種アプリケーションのプログラミング例
- ロボットと制御システムのシンプルな接続
- 3Dインターフェースとデジタルツインによる直感的な操作で、モーションシーケンスの直接実行と確認が可能
- 制御システムとソフトウェアから直接カメラインターフェースを設定可能
- デルタ、リニア、スカラ、多関節アームロボットのプログラミングが可能
- 購入前でも無償ソフトウェアによるテストが可能
システム要件:
- Windows 10オペレーティングシステム搭載PC
- イーサネットまたはWLANによる通信
- 500MBのディスク空き容量
サンプルプログラム、wiki、トレーニングコース



インターフェース
PLC インターフェイス
PLC(PLC = Programmable Logic Controller)インターフェースは、基本機能の実行とデジタル入出力による状態のシグナリングを実現します。PLCによる制御に加えて、このインターフェースはハードウェアボタンによる操作も可能です。
デジタル入出力
ロボットプログラムの読み込みや起動、デジタル入力やグローバル信号によるグリッパーコマンドの送信などが可能です。ボタンやCRI-GSig命令による選択肢からプログラムを選択する場合に便利です。
Modbus TCP/IP
Modbus(モドバス)TCPインターフェースは、PLCデータや命令をロボット制御システムに送信し、ステータス情報を受信するために使います。
CRIインターフェース
CRIインターフェースにより、TCP/IPを用いてEthernetインターフェースを介して複雑な命令を送信し、情報と設定を取得できます。イグスロボットコントローラーはこのインターフェースを使用して、統合制御システムまたは制御システムのその他インスタンスを備えたロボットに接続します。
カメラインターフェース
カメラインターフェースにより、オブジェクト検出とビデオカメラを使用できます。オブジェクト検出カメラは、オブジェクトの位置とクラスを認識し、オプションでビデオ画像とともに制御システムに送信します。制御システムは、カメラのオブジェクト位置からロボット座標系の位置を計算します。純粋なビデオカメラは画像のみを配信するため、作業領域の観察にのみ使用でき、オブジェクトの検出には使用できません。
クラウド
クラウドインターフェースにより、RobotDimensionを介して、ロボットを監視することができます。起動してログインすると、ロボットは、基本的なステータス情報とカメラ画像をオンラインサービスに送信します。ユーザーは、自分のロボットをウェブサイトに登録し、情報を取得することができます。
ROS、Matlab、LabViewなど、さまざまなものがあります。
ロボットをROS環境に統合します。ハードウェア通信、Teleop、moveI のドキュメントとパッケージ
プロジェクト構成
グリッパー
エンドエフェクタは、ここで指定できます。エンドエフェクタを変更するには、プロジェクトをリロードするか、統合制御システムを再起動する必要があります。新しいツールは、「Data/Tools」ディレクトリの設定ファイルとして定義できます。
バーチャルボックス
ロボットアームの可動範囲は、バーチャルボックスの設定によって制限されます。この機能により、作業内容に応じて機械的損傷を防止したり、プログラミングを簡略化したりすることができます。バーチャルボックスに違反するプログラムが実行されると、エラーメッセージとともに停止します。
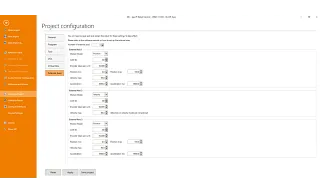
外部軸
ロボット制御システムは、最大3本の追加軸(iRCでは「外部軸」とも呼ばれます)をサポートします。これらはロボット軸に応じて設置でき、iRCの設定エリアから設定できます。

プログラム
ここでは、ロボットとロジックプログラム、移動速度(最高速度に対する割合)、再生モード、プログラムエラー時の反応などを設定します。
特殊なロボットタイプ
ロボット制御システムは、デジタルツインを使用して、ロボット用にカスタマイズできます。お使いのプロジェクト業務に合わせて、逆運動学を構成します。
プログラミング
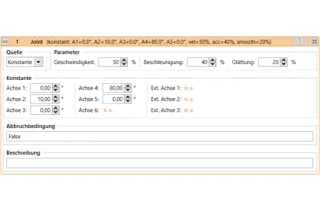
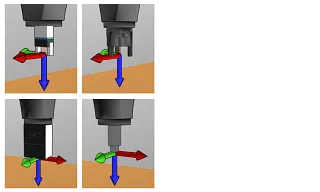
軸移動
ジョイントコマンドは、ロボットを軸座標で指定された絶対目標位置に移動します(例、軸の角度または直線軸の位置)。結果として生じるTCPの動きは、通常、直線ではなく曲線です。
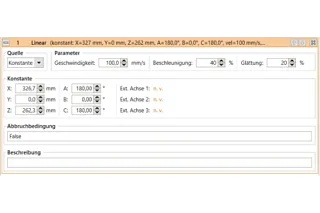
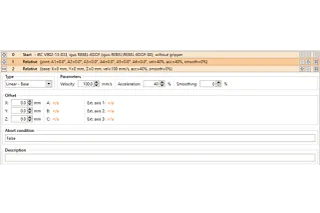
直線移動
リニアコマンドは、デカルト座標で指定された絶対目標位置にロボットを移動させます。結果として生じるTCPの動きは直線をたどります。
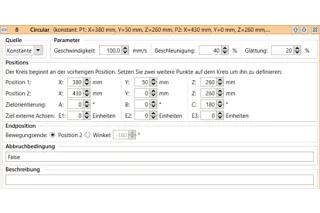
円運動
円運動命令では、完全または部分的な円に沿って運動することができます。直線運動と互換性があるため、直線運動からの移行と直線運動への移行を滑らかにすることができます。
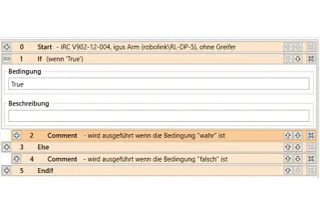
条件
条件は、if-then-else コマンド、ループ、および移動コマンドの終了条件として使用できます。条件は、デジタル入力、グローバル信号、ブール演算、および比較の組み合わせです。
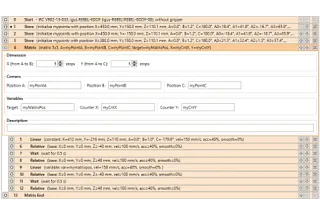
行列計算
グリッド指示は、パレタイジング作業のためのグリップ位置や積み込み位置として、グリッドと整列した位置を計算します。
相対移動
相対移動コマンドは、ロボットを現在位置から相対的に移動させることができるコマンドです。「アクション」→「相対移動」のメニュー項目で呼び出すことができます。

サブプログラム
サブプログラムは、Subコマンドを使用して呼び出すことができます。サブプログラムファイルへのパスは、「ファイル名」で指定します。これは、iRC の「データ」フォルダのサブフォルダ「プログラム」からの相対パスです。
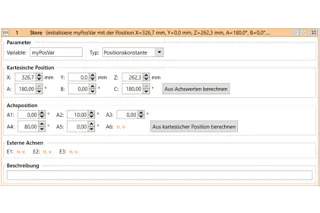
変数と変数アクセス
イグスロボットコントローラーとTinyCtrlのプログラムでは、2種類の変数がサポートされています:
- 数値変数:整数または浮動小数点数の格納に使用できます。
- 位置変数:これらは、デカルト位置や関節位置を格納するために使用できます。このような変数がデカルト位置として解釈されるか、関節位置として解釈されるかは、文脈によって異なります。
ロボット制御ソフトウェアのダウンロード

1
ライセンスフリーイグスのロボットコントローラー用ソフトウェアは、制御システムに統合されているため、システムのコンポーネントに対して、標準化された操作コンセプトと一貫した通信サービスを利用できます。これにより、プロジェクト計画の労力が軽減され、試運転がよりスピーディーになります。
- ソフトウェアを使ってすべてのイグスロボットを事前にテスト
- すべてのイグスロボット、単軸ロボット、AGVのプロジェクトが事前にプログラムされています。
- ロボットのシミュレーションが可能な直感的な3Dインターフェース
お問合せ
ご不明な点がございましたら、お気軽にお問い合わせください。

お問合せ対応時間
電話およびチャットでの対応時間:
月曜~金曜:8:45~18:00