言語の変更 :
手術支援ロボット用の精密でクリアランスのない滑り軸受とリニア軸受
ドライリンのグライドバーは、絶対的にクリアランスのないベアリングを保証します。
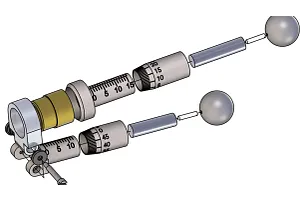
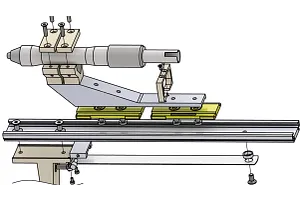
ライプニッツ大学ハノーファーメカトロニクスシステム研究所で開発されたこのシステムは、感音難聴や高度難聴の治療のための低侵襲人工内耳手術を行う医師をサポートします。この技術では、頭蓋骨の下35mmまで、保護が必要な解剖学的構造のすぐ近くに穿刺穴を開ける必要がある。そのため、システムは非常に正確に作動し、蒸気滅菌などの医療衛生要件も満たさなければならない。手術器具ガイドには、2つのキャリッジを備えたドライリンNグライドバーが加わりました。さらに、無潤滑で医療用途に理想的なイグリデュールXプレーンベアリングが複数使用されています。

使用製品

お問合せ
ご不明な点がございましたら、お気軽にお問い合わせください。
イグス株式会社03-5819-2500メールで問い合わせる
お問合せ対応時間
電話およびチャットでの対応時間:
月曜~金曜:8:45~18:00