イグス ロボットコントローラを使ったロボット制御システム
イグス ロボットコントローラは、低度から中程度の作業を柔軟かつ効率的に自動化する際に、最初に候補となるツールです。制御システムとソフトウェア間の通信は、イーサネットまたはWi-Fiを介して行います。さらに、制御システムは統合機能を介して、Modbusや自社開発のCRIインターフェースなど、さまざまな通信プロトコルに対応した複数のインターフェースを提供しています。統合された入出力モジュールと強力な通信インターフェースにより、シンプルで洗練された機械コンセプトが可能になりました。イグス ロボットコントローラを使えば、ロボットプログラミングと制御がシンプルで直感的にできるようになり、自動化への参入も容易になります。モジュール設計により、ユーザーは、デルタロボット、リニアロボット、多関節ロボットなど、さまざまなイグスキネマティクスも制御できるようになります。
ロボットコントローラのショップページへ
すぐに始められるプラグアンドプレイソリューション
イグス ロボット コントロールは、シンプルで直感的なロボットプログラミングと制御を可能にし、自動化を始めるのが簡単になります。短い学習期間の後、従業員は簡単なアプリケーションの制御とプログラミングができるようになります。モジュラー設計により、ユーザーはデルタロボット、リニアロボット、関節ロボットなどのさまざまなイグスキネマティクスを制御できます。お客様の利点:- 優れたコスト効率
- コンパクトで軽量
- システムに不要なコンポーネントはありません
すべての動作タイプに対応する1つのロボット制御システム
イグスロボットコントロールは、トップハット(DIN)レールバージョン(制御盤に組み込み)または制御盤バージョン(独立したシステム)としてご利用いただけます。すべてのバージョンは、弊社開発のイグスロボットコントロールソフトウェアで制御可能です。モジュール設計により、ユーザーはデルタロボット、リニアロボット、多関節ロボットなど、さまざまなイグスキネマティクスを制御することができます。- ティーチイン:ハンドヘルド制御機能
- インターフェース:Modbus TCP/IP、7つのデジタルI / O、イーサネットCRI、ROSなど
- 通信:イーサネットまたはWi-Fi
- モーションシーケンス:円運動、速度コマンド、if-then-else、行列計算など。
- サンプルプログラム:イグスのリニアロボット、デルタロボット、多関節アームロボット、スカラなど、100 以上のサンプルプログラム。
制御システムのハードウェアについて問い合わせる

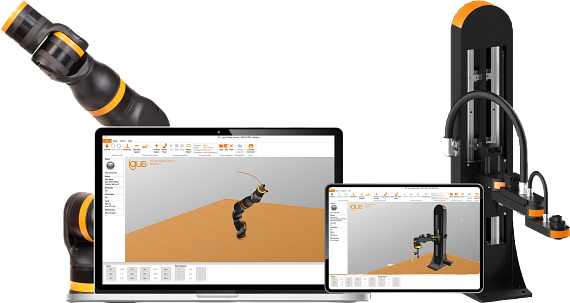
統合された制御ソフトウェアが含まれています
無料、 ライセンスフリー のイグスロボットコントロールソフトウェアは、制御システムに統合されているため、システムの多くのコンポーネントに対して、統一された操作コンセプトと一貫した通信サービスを利用することができます。これにより、プロジェクト計画の労力を軽減し、試運転を容易にすることができます。- ソフトウェア内で動作のシミュレーションが可能
- すべてのイグス リニアアクチュエータ、スカラ、AGVのための構成済みプロジェクト
- ロボットのシミュレーションができる直感的な3Dインターフェース
ソフトウェアについてさらに詳しく
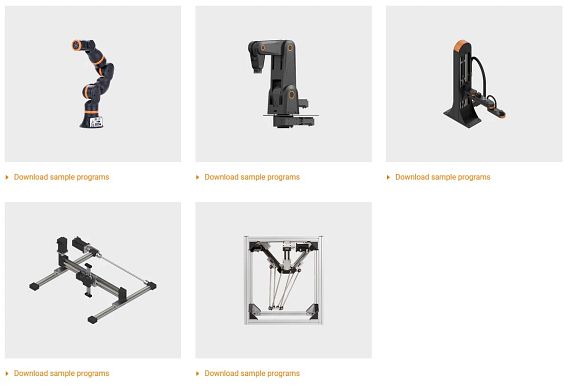
サンプルプログラム
サンプルプログラムを使って時間とコストを節約:シンプルな部品とイグスのサンプルプログラムを組合せることで、お客様の機械にイグス ロボットコントローラを素早く統合することができます。
- トレーニング動画をオンデマンド配信
- 多数のトレーニング動画をメディアライブラリで管理
- あらゆるロボットキネマティクスを動画で紹介
- すべてのコンテンツがオンデマンドで利用可能
サンプルプログラムへ
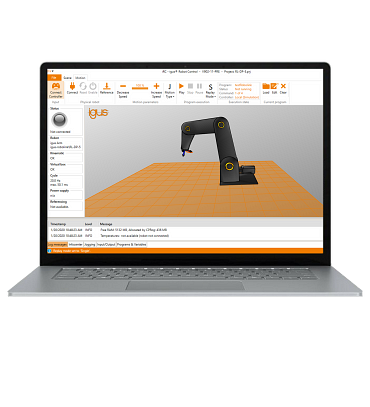
イグスのロボット制御ソフトウェア
ロボットプログラミングはこれ以上ないほど簡単です。イグス ロボットコントロールは、シンプルで直感的なロボットプログラミングと制御を可能にし、自動化への参入を容易にします。モジュラー式により、例えばデルタロボットやガントリー、多軸ロボットなど各ロボットキネマティクスを制御できます。ソフトウェアを使用して、3Dインターフェース上でロボットの各動きをシミュレーションすることができます
今すぐ無料でソフトウェアをお試しください